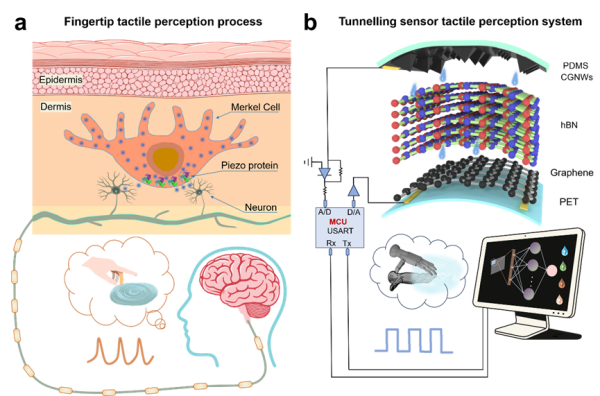
智能机器人执行超精细操作任务时,如何在复杂环境中通过触觉辨别细微压力(如流体环境)是一项亟待解决的技术瓶颈。尽管高灵敏度柔性触觉传感器已有大量研究报告,但由于柔性传感器易受到本征噪声的限制,在实际应用中的压力分辨率水平仍难以满足需求。 近日,中国科学院重庆绿色智能技术研究院研究团队受人...